

The second article on this sequence mentioned the underlying rules widespread to all motors. As we’ve seen, all of the motors produce both interplay torque, reluctance torque or a mixture of each. From the automobile’s perspective, the kind of torque that the motor produces is irrelevant. The essential difficulty is the Torque versus Velocity (T vs N) curve. A typical T vs N curve {that a} traction motor utilized in EVs will need to have is proven in Determine 1.
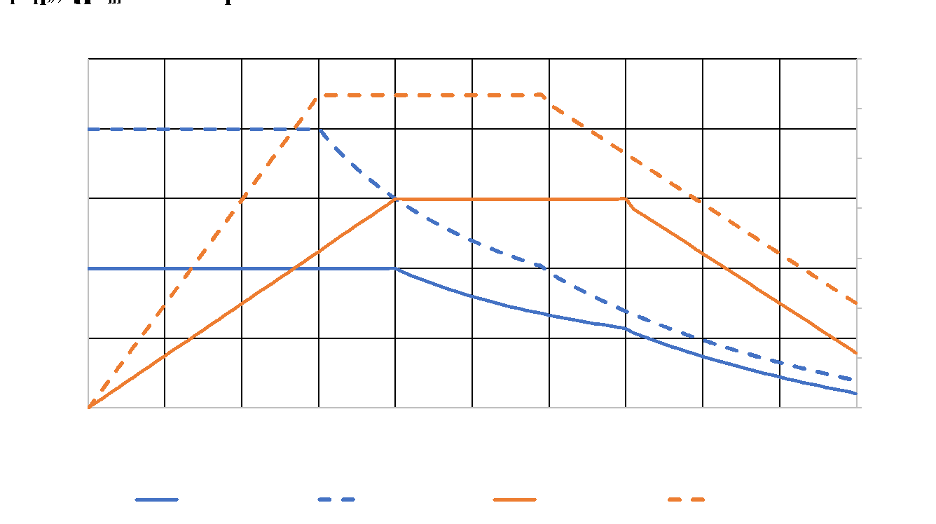
One distinctive attribute of motors is that they are often overloaded, i.e., they will ship extra energy/torque than they’re designed for, albeit for a brief length. The overload functionality of a motor displays its final output efficiency and is essential in transportation purposes as a result of it determines the instantaneous acceleration skill. The magnitude and length of the overload capability of motors are restricted, first, by its stalling or breakdown torque and, second, by its working temperature.
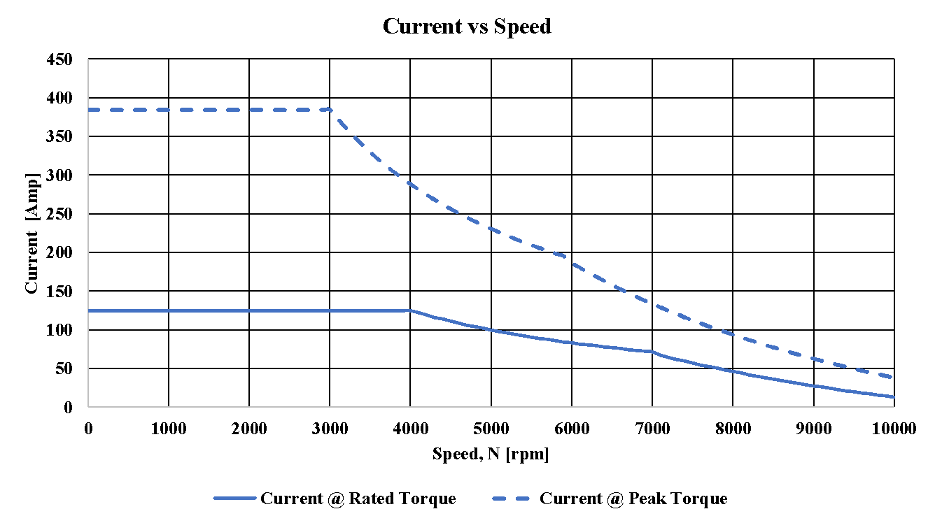
The breakdown torque of the motor is analogous to the stalling torque of an inside combustion engine. When the motor works in an overload situation, the electromagnetic parameters change drastically, leading to magnetic saturation and large loss Ohmic and Core losses. When the motor is overloaded, the output torque is rapidly saturated, i.e., for instance, the rated present might go to three instances the rated worth, and the output torque will increase by issue 2.
It’s because the stator core of the motor reaches saturation, and the air hole magnetic density is decreased because of the nonlinearity of the magnetic circuit. To grasp this phenomenon, allow us to have a look at Determine 2, which exhibits the present equivalent to the Torque values proven in Determine 1. By way of Determine 2, we observe that the rise in present is larger than the rise in torque, indicating that the torque doesn’t scale linearly with the present.
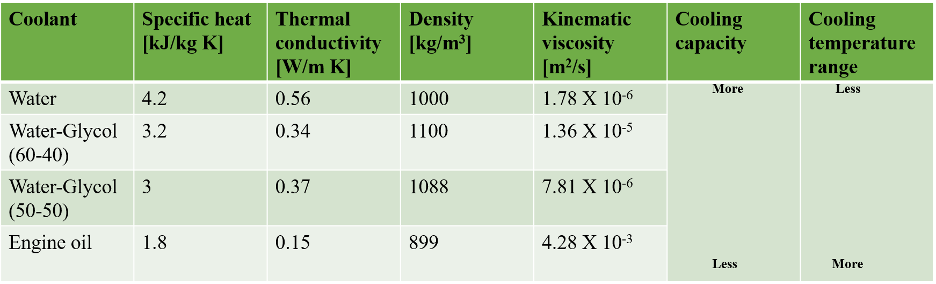
It’s evident {that a} excessive present is required to overload the motor leading to extra Ohmic (or copper losses). The upper Ohmic losses end in a temperature rise within the winding of the motor. Because the temperature of the winding will increase, the copper resistance additional will increase leading to a lower in effectivity with each improve within the working temperature. In a typical case of a motor with 90% full-load effectivity at 75 levels centigrade, the effectivity will likely be decreased by 0.5% by a rise to 105 levels centigrade copper temperature or by 1.25% if the temperature is raised to 150 levels centigrade. Such a rise within the losses additional raises the temperature, inflicting cumulative heating, or “temperature creep”. The motor’s overloading have to be fastidiously included within the motor design section, and detailed consideration have to be paid to the cooling method and coolant used.The utmost warmth is generated within the stator of the motors, and stator cooling ought to be carried out fastidiously. Stator cooling takes convection into consideration to chill both the rear of the stator, a course of often known as direct cooling, or cooling the housing. Direct cooling designs fluctuate within the form of ducts and circulate price, nevertheless it additionally varies when it comes to their path, axial or helical cooling. Nevertheless, it is very important be aware that many of the automotive business at the moment makes use of helical, but axial cooling continues to be being equally researched and developed. The schematic of the 2 cooling programs is proven in Determine 3. Moreover, the effectiveness of the cooling system relies on the coolant used. The properties of assorted coolants utilized in motors are summarized in Desk 1.
On this article, we mentioned the traits curves of the overloading problems with the motor. Within the subsequent article, we’ll dwell deeper into the traits curves and analyse them from the design standpoint.
In conclusion, this text has delved deeper into the distinctive traits of electrical motors and highlighted their overload functionality, which determines their final output efficiency.
(Dr. -Ing. Praveen Kumar is Professor, Division of Electronics and Electrical Engineering, IIT Guwahati. Views are private.)









{kind=link}